Cohesion Robotics
This project was started with a goal to build an autonomous robot that can move freely in horizontal plane with obstacles, semiconscious of its surroundings.
This project was started with a goal to build an autonomous robot that can move freely in horizontal plane with obstacles, semiconscious of its surroundings. A team of six people worked on this project with me as the team leader, in charge of mechanics and design, creation of methematical model of the robot, system simulations and firmware writing.
Robot was composed of few major parts:
- Driving system with odometry that allowed the robot to move with little constrains and high precision position calculation. The mechanical solution is shown in figure 2.
- The robotic arms that allowed the robot to do simple tasks of moving and grabbing lightweight objects. An arm had 4 degrees of freedom where one was linear and other three were rotational as shown in figure 3.
- 2D Lidar system for localization, obstacle detection and determining relative robot position. Lidar position in the robot is shown in figure 4.
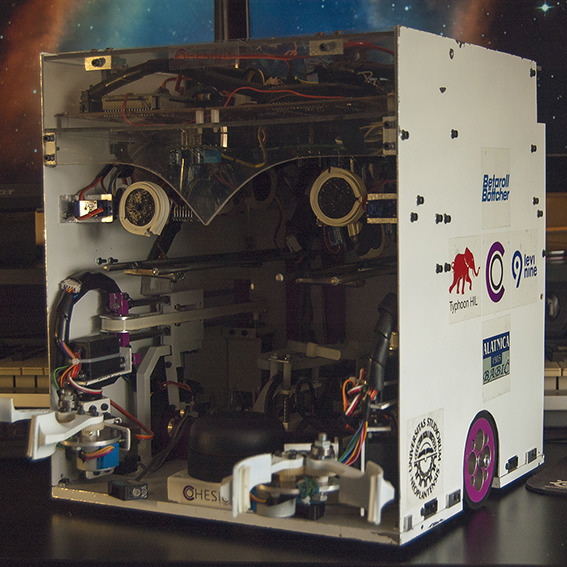
- Control and logistic system consisted of two Arduino Due boards and Raspberry Pi as shown in figure 5. One Arduino was in charge of driving wheels actuators and collecting data from odometry encoders; other Arduino was in charge of controlling arms, other small actuator systems and collecting data from sensors; and Raspberry Pi was in charge of collected data analysis, making decisions based on: analyzed data and mathematical equations results, and passing control information to Arduinos to be executed.
- Other small systems for error detection and completion of second order tasks.
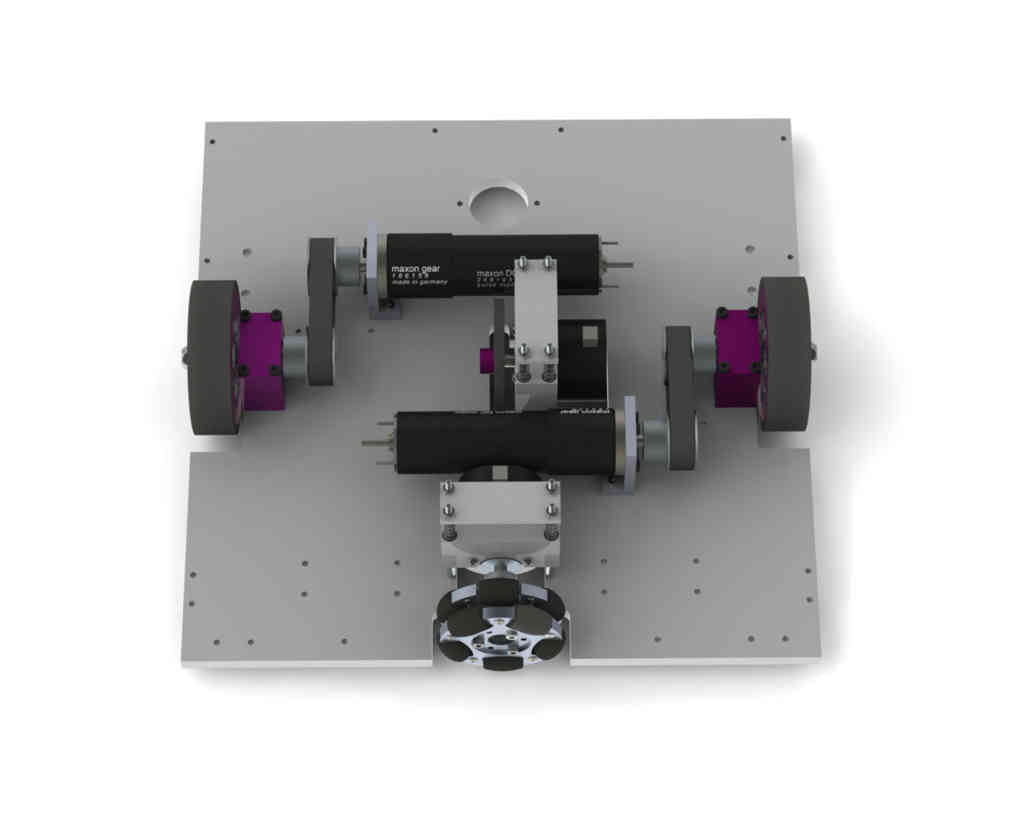
Figure 2 - Driving system and odometry of the robot.
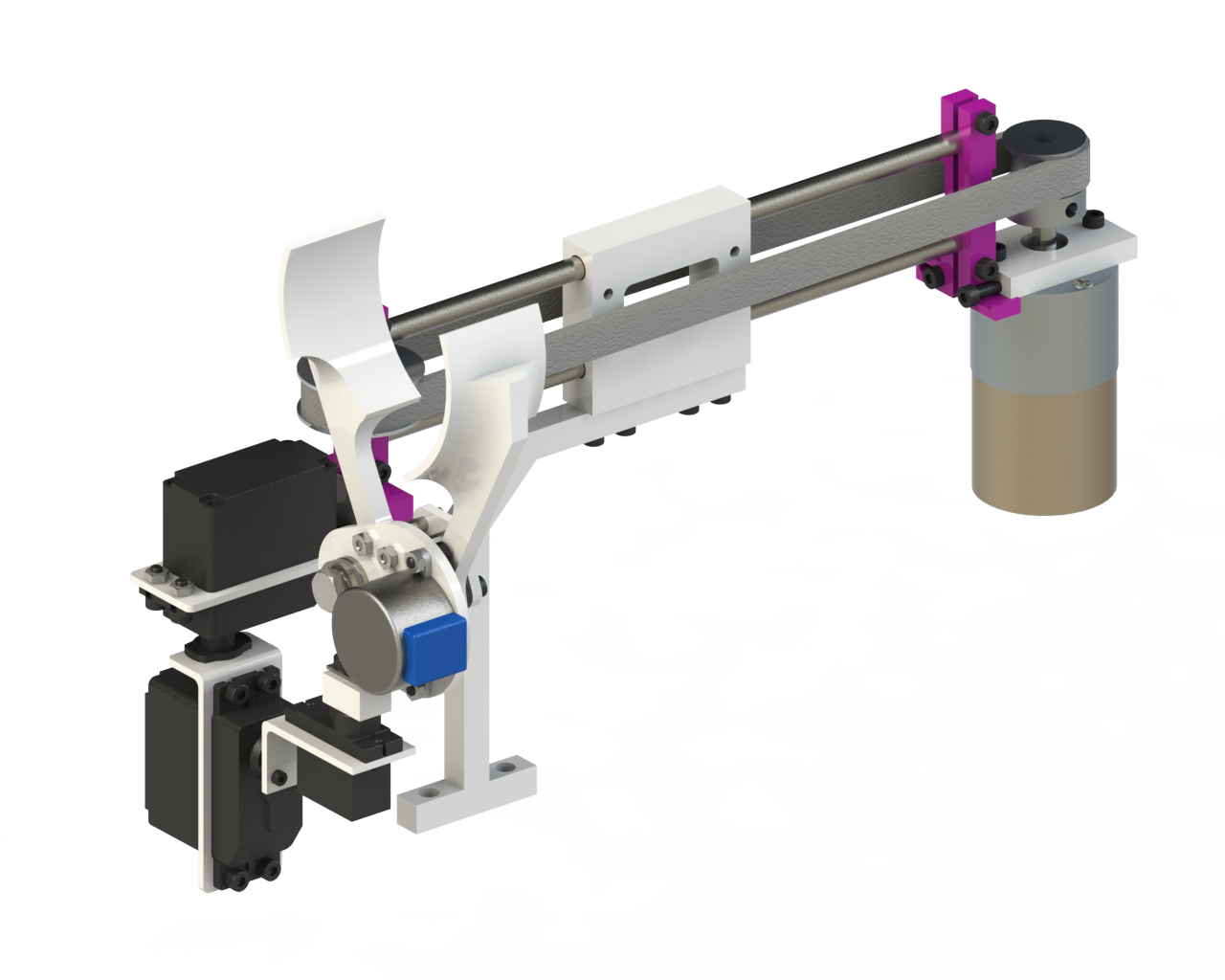
Figure 3 - Robotic arm with 4DOF.

Figure 4 - 3D render of the robot with Lidar mounted at the front.

Figure 5 - Control logic system of the robot.
Video 1 - Robot position solving and movement simulation.

Video 2 - Lunar module aiming simulation.

Video 3 - Robot in action.