Simple Robotic Arm
This project covers a robotic arm of an anthropomorphic configuration.
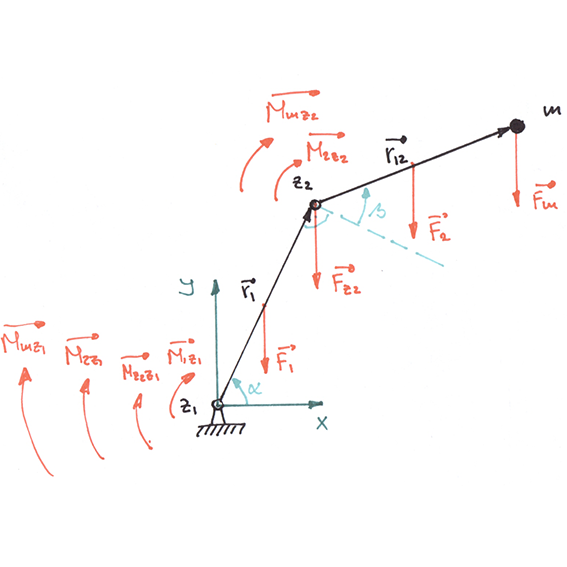
This project covers a robotic arm of an anthropomorphic configuration where solution for inverse kinematic problem is given without using Jacobian, therefore solver can be run in real-time on MCU like an Arduino. More information can be found in documentation PDF.
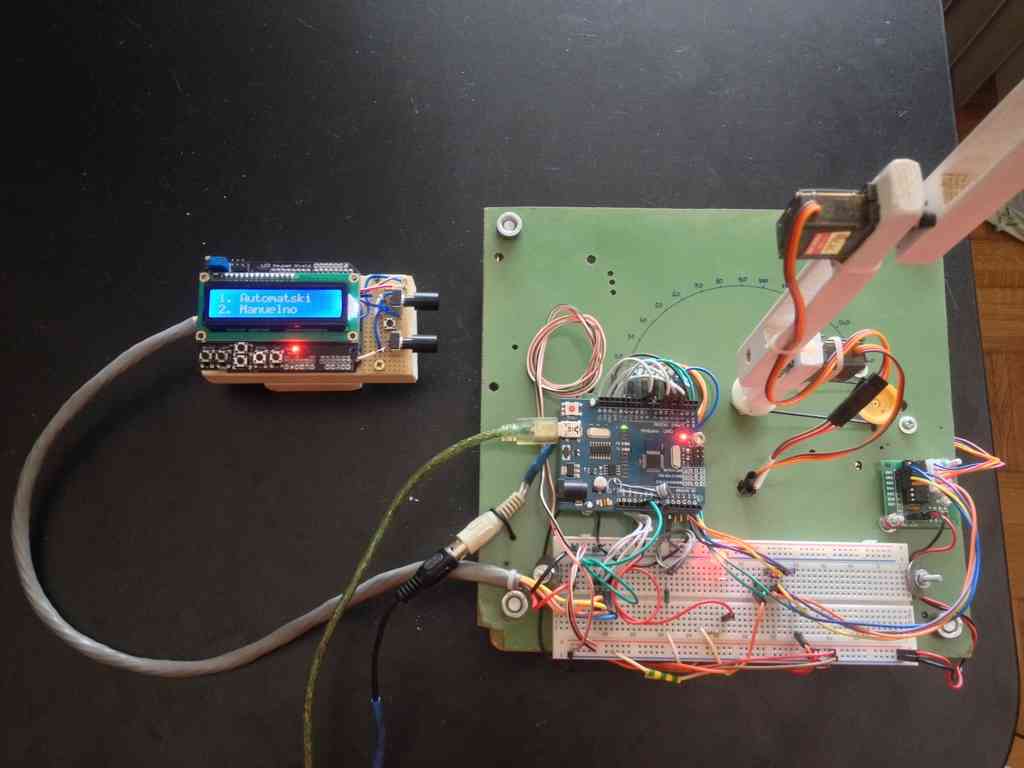
Figure 1 - Some of custom boards.